Guilherme Christmann
Posts
Pubs
Pics
Publications
IROS 2024
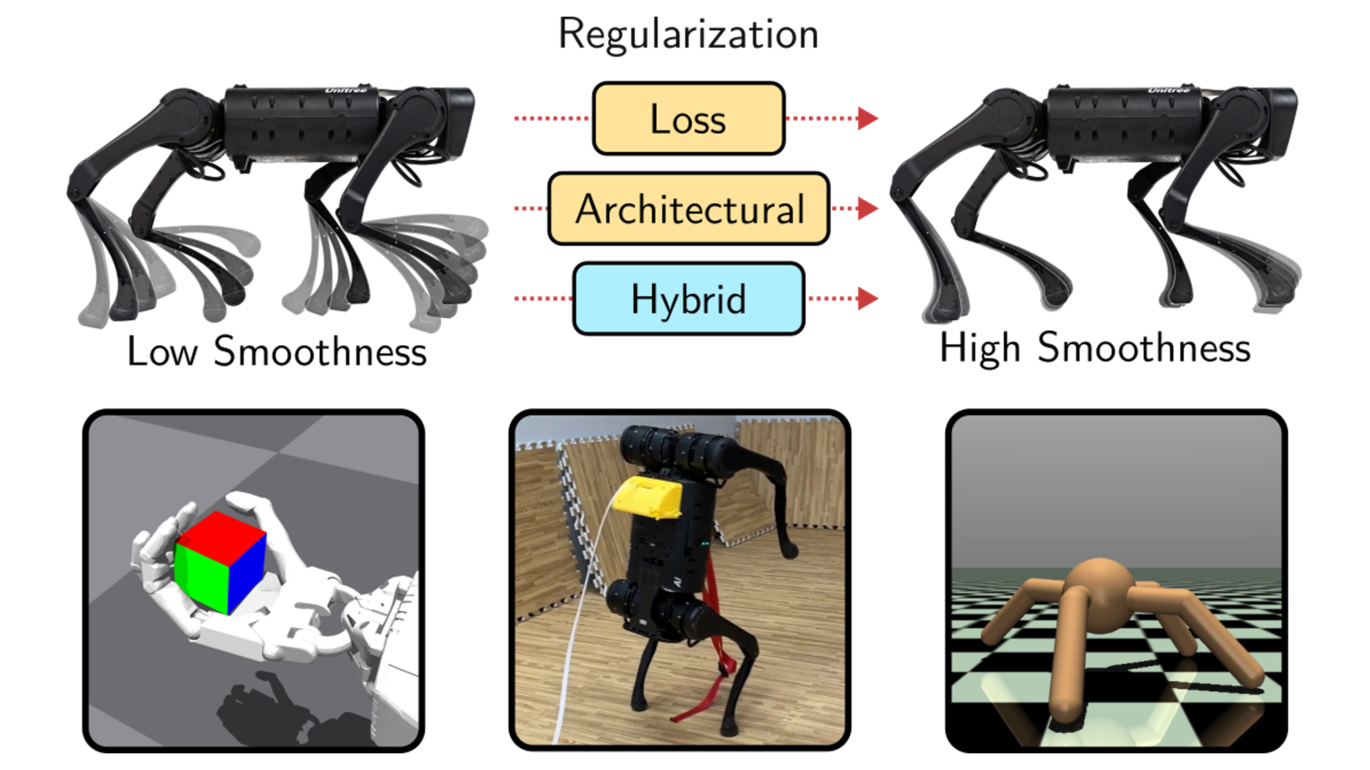
Benchmarking Smoothness and Reducing High-Frequency Oscillations in Continuous Control Policies
High-frequency oscillations are common in RL, we worked on how to improve smoothness without sacrifing performance.
Project Page
ICRA 2024
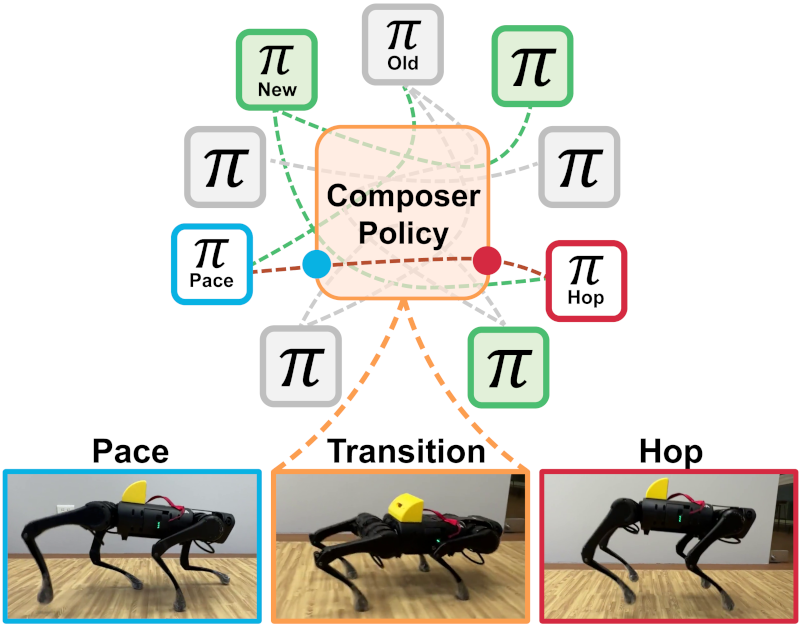
Expert Composer Policy - Scalable Skill Repertoire for Quadruped Robots
Expert Composer Policy lets quadruped agents seamlessly chain motion skills with near-perfect transitions, enabling scalable and modular repertoire expansion.
Project Page
ICRA 2023
Expanding Versatility of Agile Locomotion through Policy Transitions Using Latent State Representation
A lightweight transition net lets quadruped robots switch between gaits in the real world with high success, enabling scalable skill composition without retraining.
Project Page